|
I am a second year PhD student at Virginia Tech, advised by Tu Vu. My research interests lie at the intersection of deep learning, language modeling, efficiency and alignment. Previously, I worked with Huazheng Wang on adversarial attacks on bandit algorithms and the impact of ordering in recommendation systems. Long long ago, I completed my Bachelor's (B.Tech) from the National Institute of Technology Tiruchirapalli (NIT-Trichy), India, where I was a part of RMI, the robotics club. Email / CV / Github / Google Scholar |

|
|
|
|
[05/20/2025] One paper accepted to EMNLP 2025 [09/12/2024] One paper accepted to TMLR. [25/08/2024] Started PhD at Virginia Tech. [01/05/2024] One paper accepted to ICML 2024. [09/26/2023] One paper accepted to Neurips 2024. |
|
|
|
Pin-Jie Lin, Rishab Balasubramanian, Fengyuan Liu, Nikhil Kandpal, Tu Vu Accepted to EMNLP 2024. paper |
|
Rishab Balasubramanian, Jiawei Li, Prasad Tadepalli, Huazheng Wang, Qingyun Wu, Haoyu Zhao Accepted to ICML 2024 paper |
|
Zichen Wang, Rishab Balasubramanian, Hui Yuan, Chenyu Song, Mengdi Wang, Huazheng Wang Accepted to TMLR paper |
|
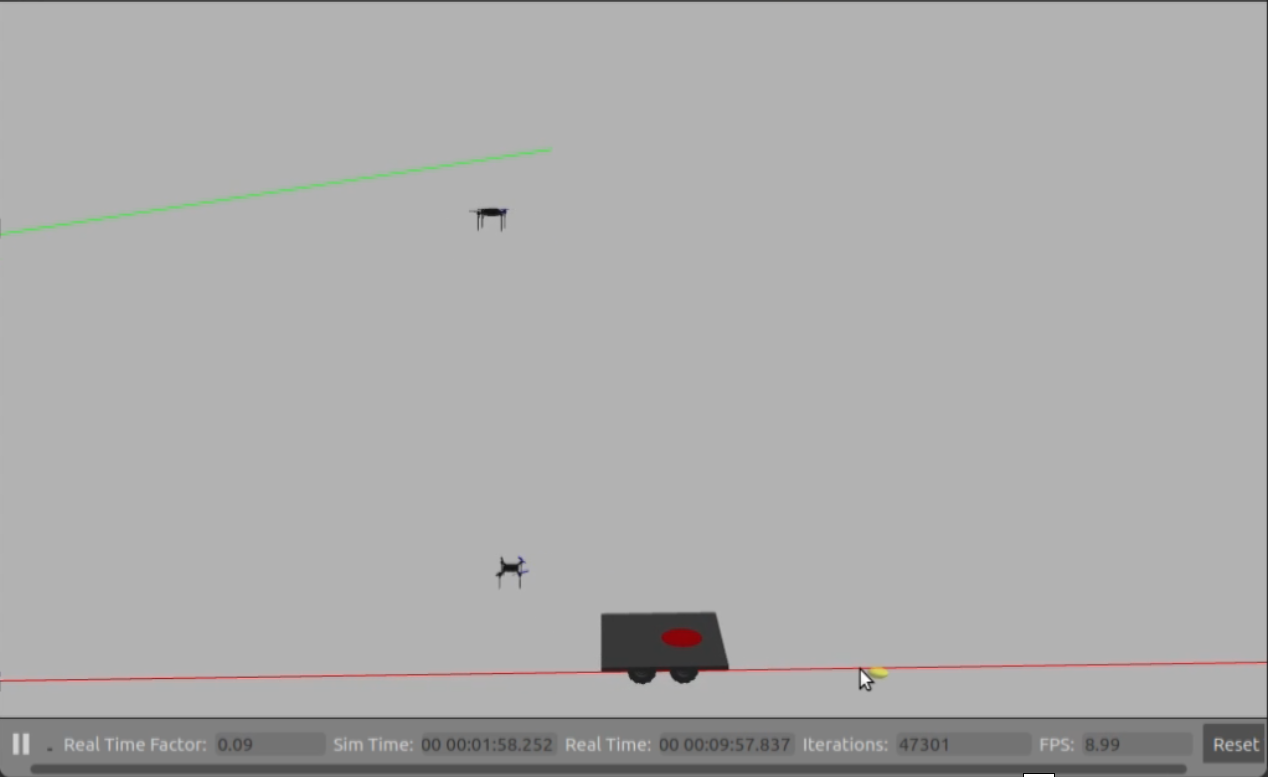
Rishab Balasubramanian, Lifeng Zhou, Pratap Tokekar, P.B.Sujit Accepted to IROS 2021 video / code |
|
Rishab Balasubramanian, P.B. Sujit Accepted to AIAA SciTech 2021 code / slides / video |
|
|
|
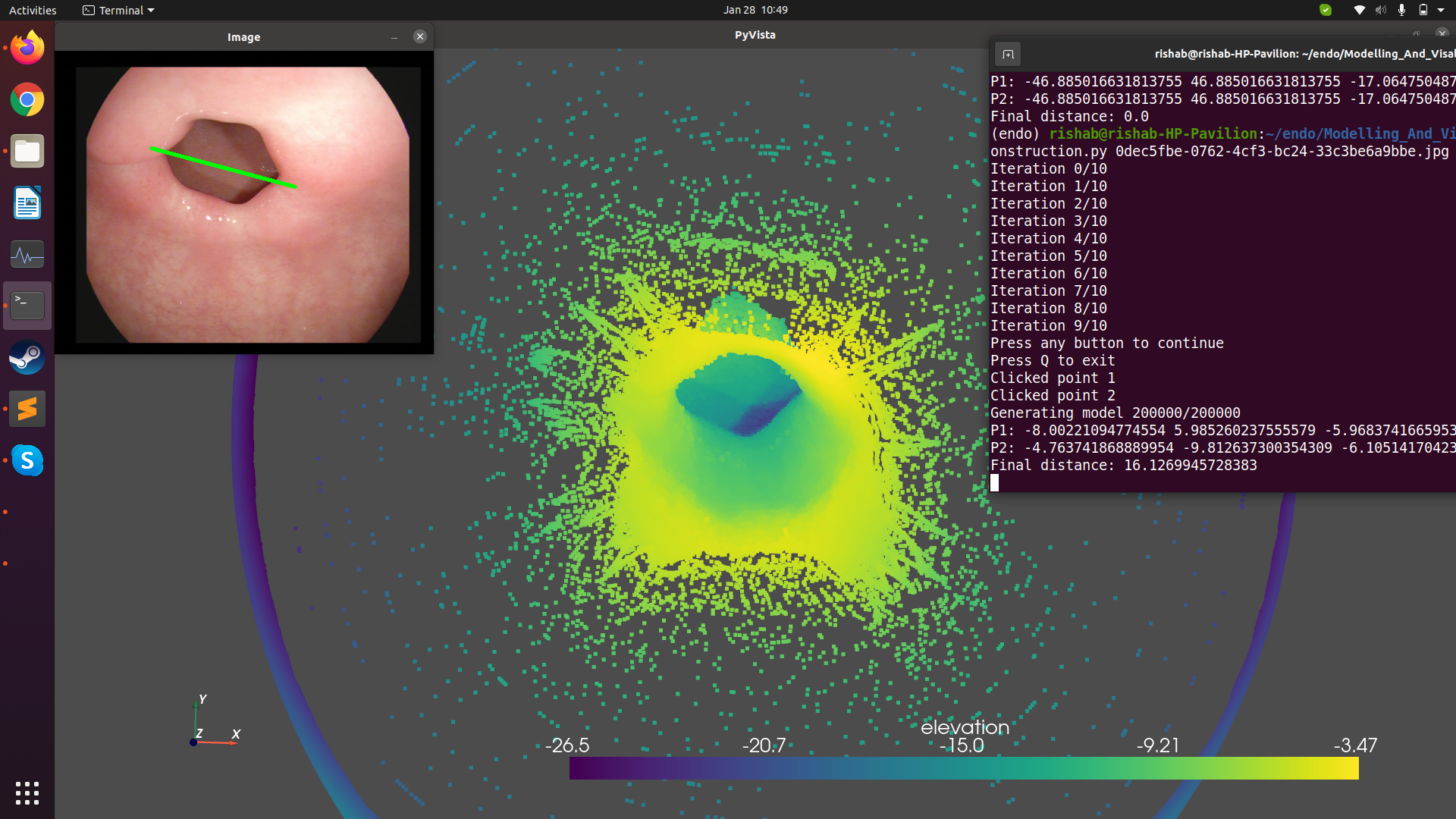
Rishab Balasubramanian, EndovisionAi |
|
Rishab Balasubramanian, Rupashree Dey, Kunal Rathore PrePrint - arXiv code |
|
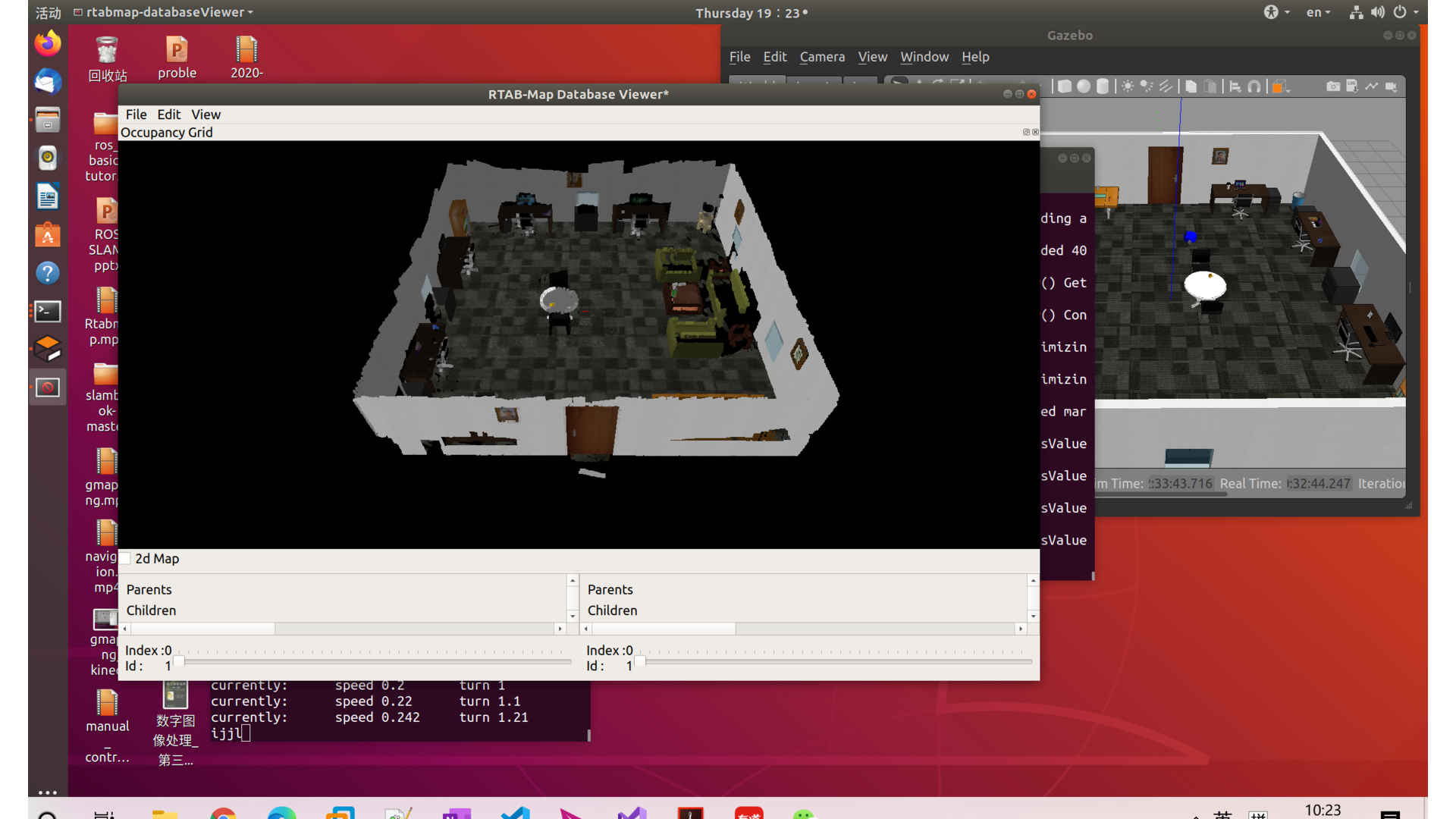
Rishab Balasubramanian, Sun Ge, Guillaume Sartoretti code Working on autonomous control of a legged robot to map a room using RTABMap Framework |
|
Rishab Balasubramanian, Lalita Soundari, Prof. M Umapathy Thesis Multi agent collision Avoidance using the Optimal Reciprocal Collision Avoidance (ORCA) Algorithm and comparison with other algorithms |
|
Rishab Balasubramanian, Ramasubba Reddy abstract / code |
|
Special thanks to Jon Barron for the website template |