

Collision Avoidance and Formation Control for Multi-Agent Systems
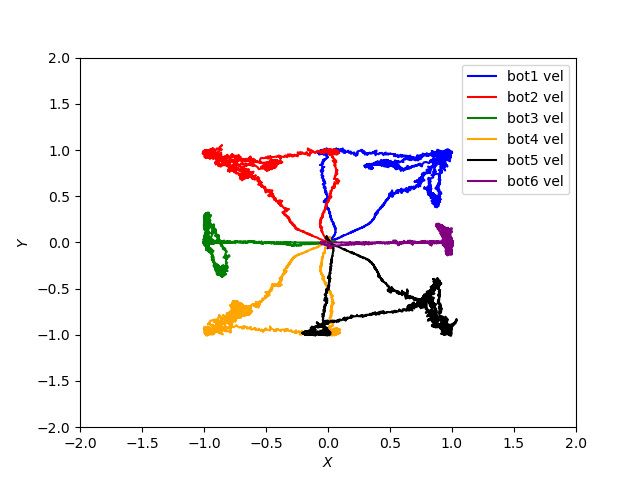
We test the robustness and runtime of the Optimal Reciprocal Collision Avoidance Algorithm (ORCA), and compare it to common algorithms such as histogram or potential field based collision avoidance algorithms. We test out algorithm in Gazebo simulations and verify its performance using ROS