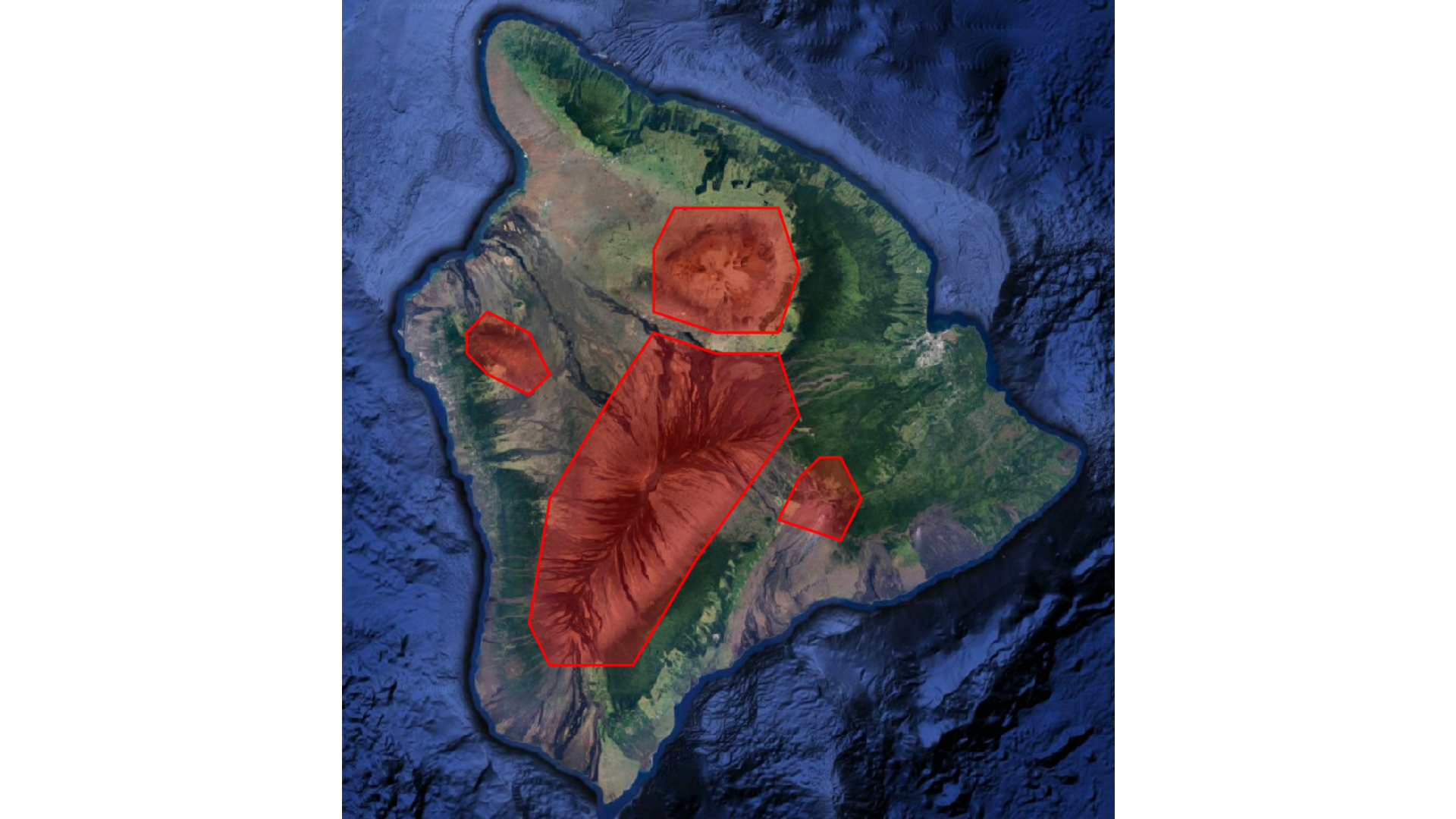
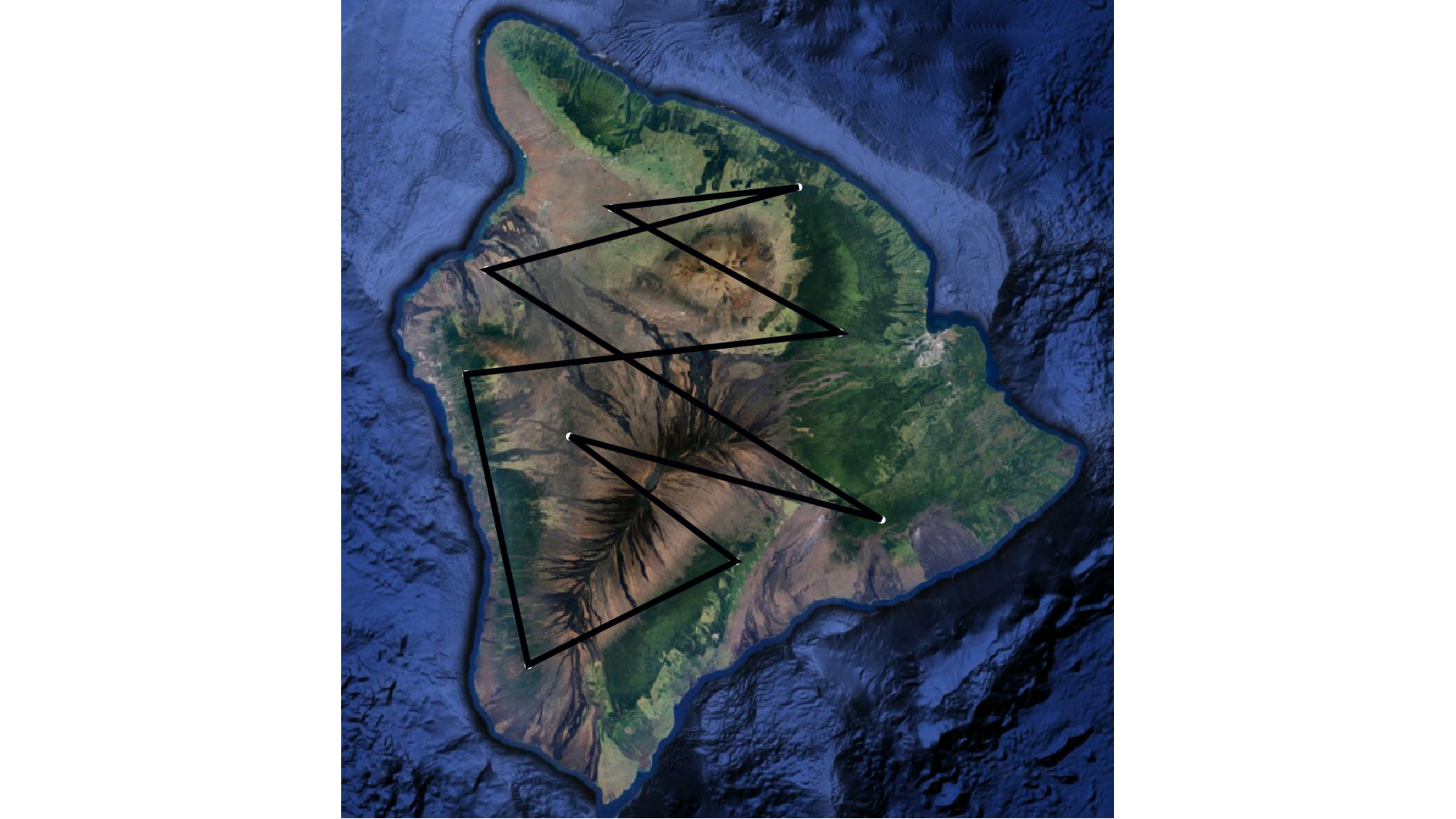
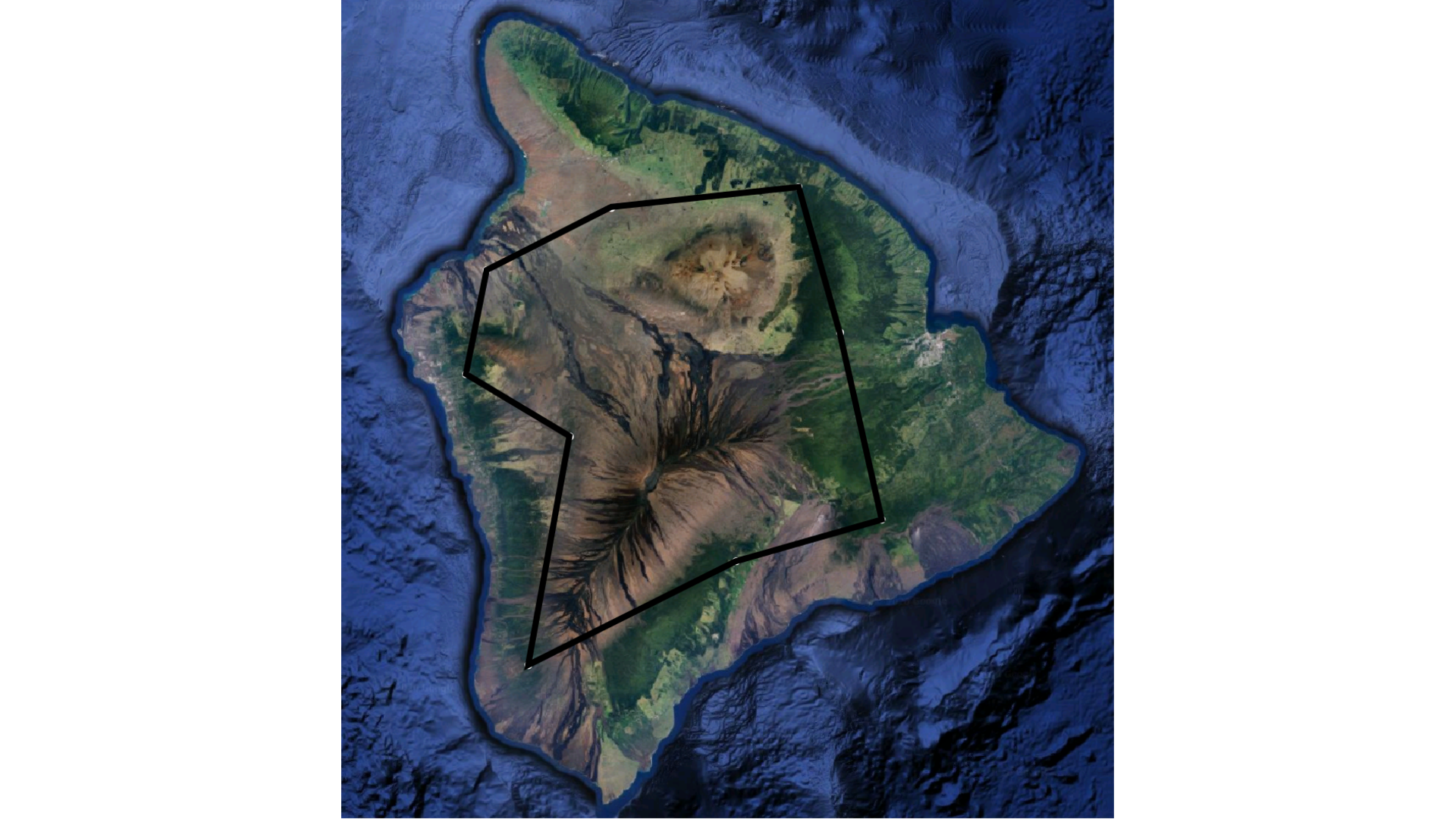
We introduced a risk-aware multi-objective Traveling Salesperson Problem (TSP) variant, where the robot tour cost and tour reward have to be optimized simultaneously. The robot obtains reward along the edges in the graph. We study the case where the rewards and the costs exhibit diminishing marginal gains, i.e., are submodular. We focus on the scenario where the costs and the rewards are uncertain and seek to maximize the Conditional-Value-at-Risk (CVaR) metric of the submodular function. We propose a risk-aware greedy algorithm (RAGA) to find a bounded approximation algorithm. The approximation algorithm runs in polynomial time and is within a constant factor of the optimal and an additive term that depends on the optimal solution. We use the submodular function’s curvature to improve approximation results further and verify the algorithm’s performance through simulations. The above images show an example of surveillance of the volcanoes of Hawaii. The second figure shows the dangerous area, and the third and fourth figure show the path that can be adopted based on the risk and reward-cost tradeoff.