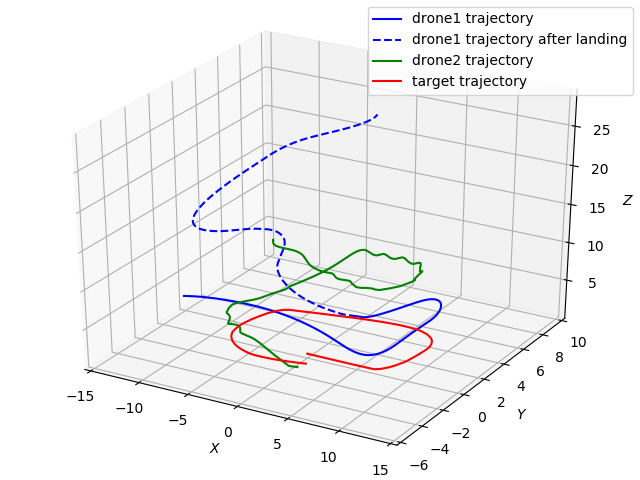
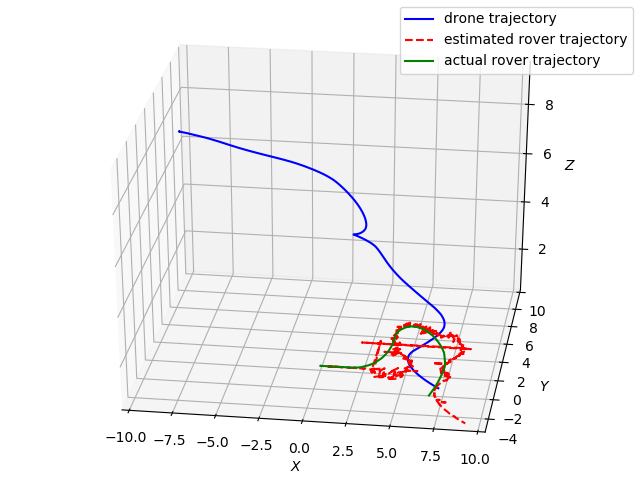
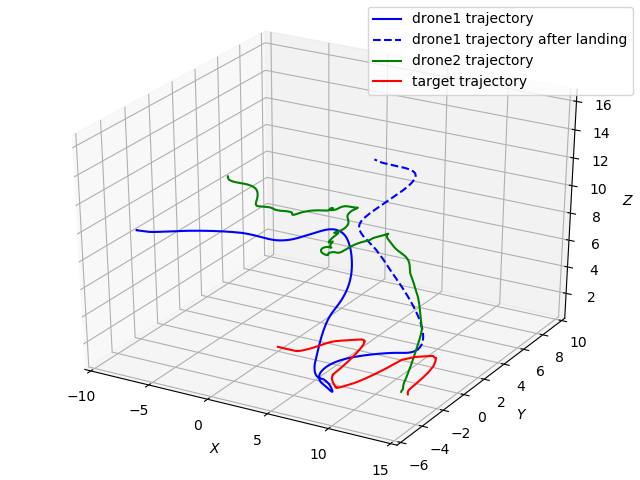
In this work we developed a SDRE-based accurate landing controller and a cooperative landing framework for quadrotors to land on a moving Unmanned Ground Vehicel (UGV). We use a vision based model to track and land on the UGV, showing that our proposed controller is able to perform well even with noisy and inaccurate measurements. We then develop a scheduling algorithm to allow multiple UAVs to land on a single target, using a Finite-State Transition Model.